


Phoenix RECON-XT yra aukštos kokybės pradinio lygio sistema. Puikiai tinka mažesnėms skenavimo sritims ir nedidelį biudžetą turinčioms komandoms. Panaudojimo galimybių lankstumas yra pagrindinis šios "Phoenix" sistemos privalumas. RECON-XT sukurta montavimui ant bepiločių orlaivių, taip pat gali būti montuojama mobiliojo kartografavimo reikmėms.
Pagrindiniai privalumai:
- Svoris: 1,8 kg;
- Matmenys: 20,7 x 12,1 x 15,7 (cm);
- Absoliutus tikslumas: 2- 5 cm RMSEz @ 80m nuotolis;
- Maksimalus veikimo nuotolis: 120 m;
- Didžiausias nuskaitymo greitis: 5/10/20 Hz, iki 3 grąžinimų;
- Lazerio sąvybės: 905 nm 1 klasė (saugu akims);
- Vidutinė vidutinė nuotolio paklaida: 10 mm (vidutiniškai 0,5 ~ 70 m, esant 50 % atspindžio koeficientui);
- Skenavimo ryšys: 640 tūkst. taškų/s, iki 1,28 mln. taškų/s dvigubo grįžimo režimu;
- Vaizdo laukas: +15°-16° vertikaliai / 360° horizontaliai;
- Daukartiniai aidai: 2;
- Lazerių skaičius: 32;
- Spindulio sklaida: 2,29 mrad/1,52 mrad.
Phoenix LiDAR SYSTEMS – LiDAR skenavimo technologijos pionieriai, kuriantys visapusiškus LiDAR žemėlapių sudarymo sprendimus. Dėmesys sutelktas į kokybiškos įrangos, intyuityvios programinės įrangos ir transporto priemonių universalumo sintezės praktinis pritaikymas. Lankstus priedų ir montavimo galimybių pasirinkimas yra vienas iš pagrindinių Phoenix privalu. Phoenix LiDAR SYSTEMS 2013 m. sujungė LiDAR skenavimo ir bepiločių orlaivių technologijas į vieną sprendimą, kuris iki šiol tobulinamas siekiant inspektavimui suteikti investicijų grąžą. Vystomas funkcionalumas užtikrina: darbų saugą, eliminuojant pavojų dirbant pavojingoje aplinkoje ir duomenų gavimo kokybę bei greitį – taip efektyvinamos darbo sąnaudos.
Kaip veikia LiDAR technologija
Phoenix LiDAR RECON ir bepiločio orlaivio sprendimas
Dažniausiai užduodami klausimai
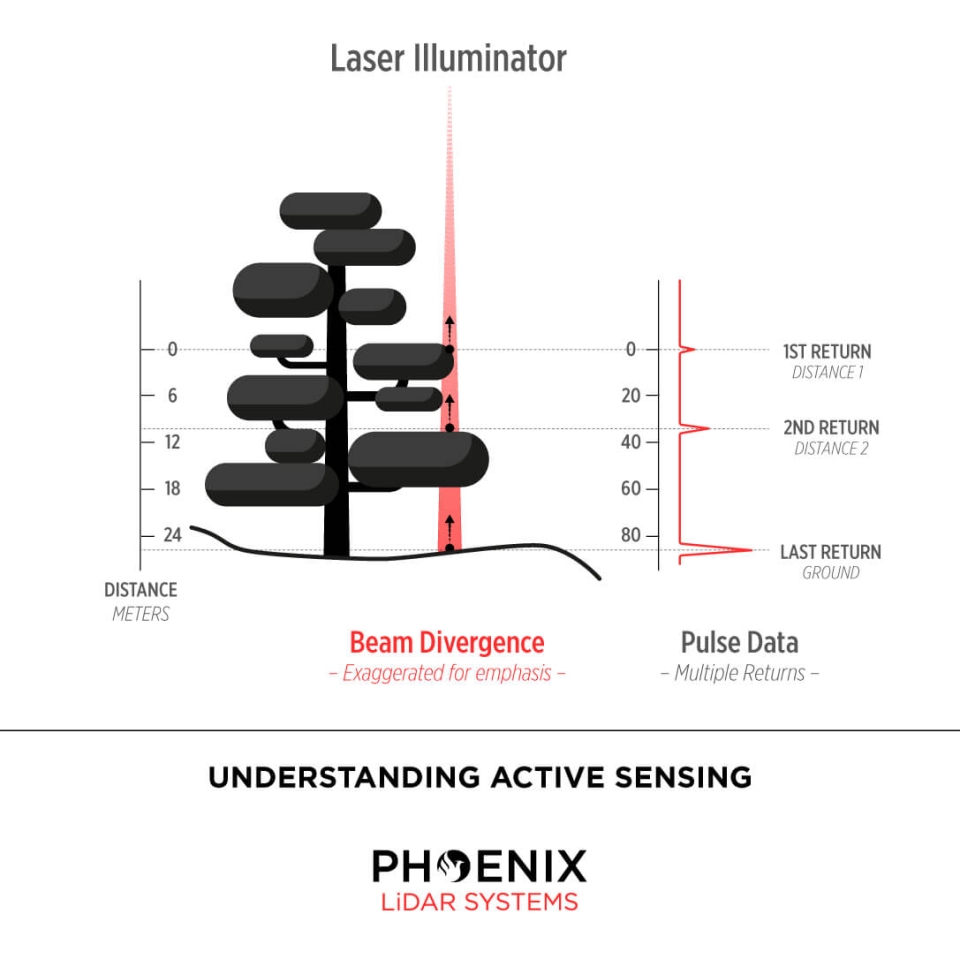
LiDAR - tai šviesos srauto aptikimo ir nuotolio iki jo įvertinimo metodas. Jis naudoja impulsinį lazerį pamatuoti nuotolį iki žemės paviršiaus per augmeniją Sistema gali užfiksuoti tikslius paviršiaus duomenis matuodama laiką, per kurį lazeris grįžta į šaltinį. LiDAR veikimui reikalingos keturios esminės dalys: LiDAR įrenginys, kuris skleidžia šviesos impulsus, pritvirtintas prie bepiločio orlaivio, skenuojančio iš anksto apibrėžtą žemės teritoriją. GPS imtuvo, kuriuo stebimos įrenginio x, y, z koordinatės. IMU, kuris reiškia inercinį matavimo vienetą, stebintį įrenginio pasvirimą erdvėje, kad būtų galima atlikti tikslius aukščio matavimus. Kompiuteris, kuris įrašo visus perduodamus duomenis. Šie šviesos impulsai ir jų gebėjimas generuoti daugkartinius grįžtamuosius signalus - kartu su kitais sistemos įrašytais duomenimis - apdorojami, kad būtų galima sukurti labai tikslią trimatę informaciją apie nuskaitytą paviršių.
Metodas, kurį naudojame centimetriniam tikslumui gauti, vadinama realaus laiko kinematine pasauline palydovinės navigacijos sistema (RTK GNSS). Ši sistema naudoja ne tik informacinį signalo turinį, bet ir palydovo signalo nešamąją bangą ir remiasi viena GNSS atskaitos stotimi, teikiančia pataisymus realiuoju laiku.
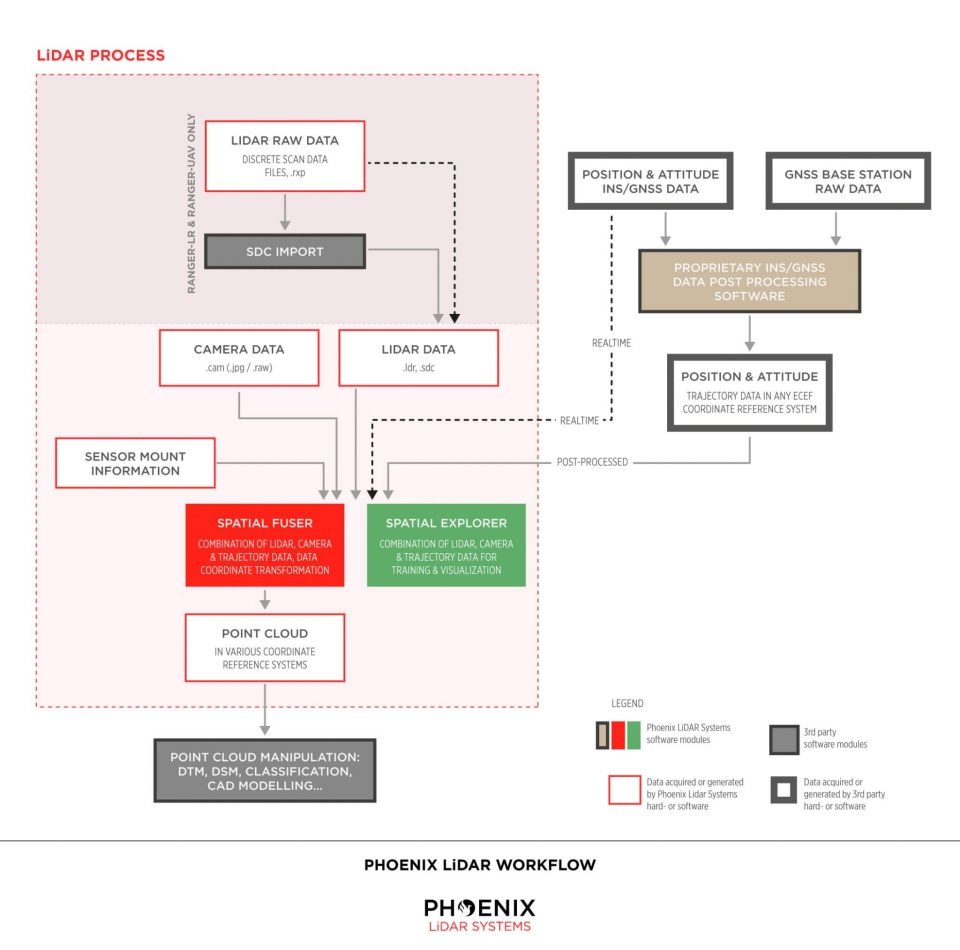
Kas nutinka per trumpus GNSS sutrikimus?
Inercinė navigacijos sistema naudoja kompiuterį, judesio jutiklius (akselerometrus) ir sukimosi jutiklius (giroskopus), kad nuolat apskaičiuotų sistemos padėtį, orientaciją ir greitį. Siekiant sujungti abi sistemas, algoritmas - tiesinis kvadratinis įvertinimas (LQE), veikia triukšmingų jutiklių duomenų srautus, kad būtų gautas statistiškai optimalus sistemos padėties, bet kuriuo laiko momentu, įvertinimas. Sujungus šią informaciją su LiDAR duomenimis, sukuriamas taškų debesis, kuris vizualizuojamas realiuoju laiku naudojant "Phoenix Aerial SpatialExplorer". Jei GNSS atskaitos stoties realiuoju laiku atliekamų pataisymų nėra arba jei dėl ilgesnių sutrikimų duomenys į "Rover" neperduodami, trečiosios šalies programinės įrangos paketu "Inertial Explorer™" galima nustatyti tikslią trajektoriją po apdorojimo. Abiejų tipų trajektorijas (realiuoju laiku sukurtas iš INS arba iš "Inertial Explorer™" po apdorojimo) galima sujungti su LiDAR duomenimis naudojant "Phoenix Aerial SpatialFuser" ir sukurti taškų debesis LAS formatu. "Phoenix Aerial LiDAR" sprendimai sukurti taip, kad juos būtų galima pritvirtinti prie beveik bet kurios transporto priemonės, o pridedama programinė įranga pirmą kartą yra tokia pat lanksti kaip ir modulis. Padalijus jutiklio valdymą ir naudotojo sąsają į atskiras dalis, galimi įvairūs kartografavimo variantai:
Aerologinis kartografavimas. "Phoenix Aerial LiDAR" sprendimai gali būti naudojami kartografavimui naudojant įvairias transporto priemones, pavyzdžiui, bepiločius orlaivius, girokopterius, fiksuoto sparno orlaivius ir kt. Operatorius paprastai būna ant žemės ir tiesiogiai prijungtas prie GNSS atskaitos stoties. Naudodamas "Phoenix Aerial SpatialExplorer" programinę įrangą, operatorius perduoda korekcijos duomenis į "Rover" per ilgo nuotolio "WiFi" sistemą. Tuomet "Rover" realiuoju laiku sujungia šiuos duomenis ir perduoda operatoriui sugeneruotą taškų debesį. Ž
Žemės kartografavimas. Operatorius keliauja su "Rover" automobiliu, valtimi ar keturračiu, jis gali tiesiogiai prisijungti prie "Rover" naudodamas "WiFi" arba interneto kabelį. Tuomet korekcijos duomenis iš GNSS atskaitos stoties į "SpatialExplorer" programinę įrangą galima perduoti per tolimojo veikimo "WiFi" arba viešąjį IP adresą (pvz., naudojant 3G/4G). Naudodamas įmontuotą 240 GB SSD kietąjį diską, operatorius gali skenuoti 6 valandas, nesustodamas atsisiųsti duomenų.
Galimybė vizualizuoti realaus laiko taškų debesis turi keletą pagrindinių privalumų:
- Operatorius gali iš karto nustatyti, ar rezultatai atitinka lūkesčius. Anksčiau rezultatus buvo galima gauti tik po nusileidimo, o tokiu atveju bet kokių pakeitimų atlikimas užima daug laiko ir kainuoja brangiai.
- Operatorius gali vizualizuoti augantį taškų debesį kompiuterio ekrane realiuoju laiku ir, naudodamasis šiais duomenimis, nustatyti dar nenuskaitytas vietas ir greitai keisti bepiločio orlaivio kursą.
- Naudodamasis 4G tinklu, operatorius gali nuotoliniu būdu realiuoju laiku dalytis savo ekranu su klientais ir patvirtinti / pakeisti LiDAR taškų debesį.
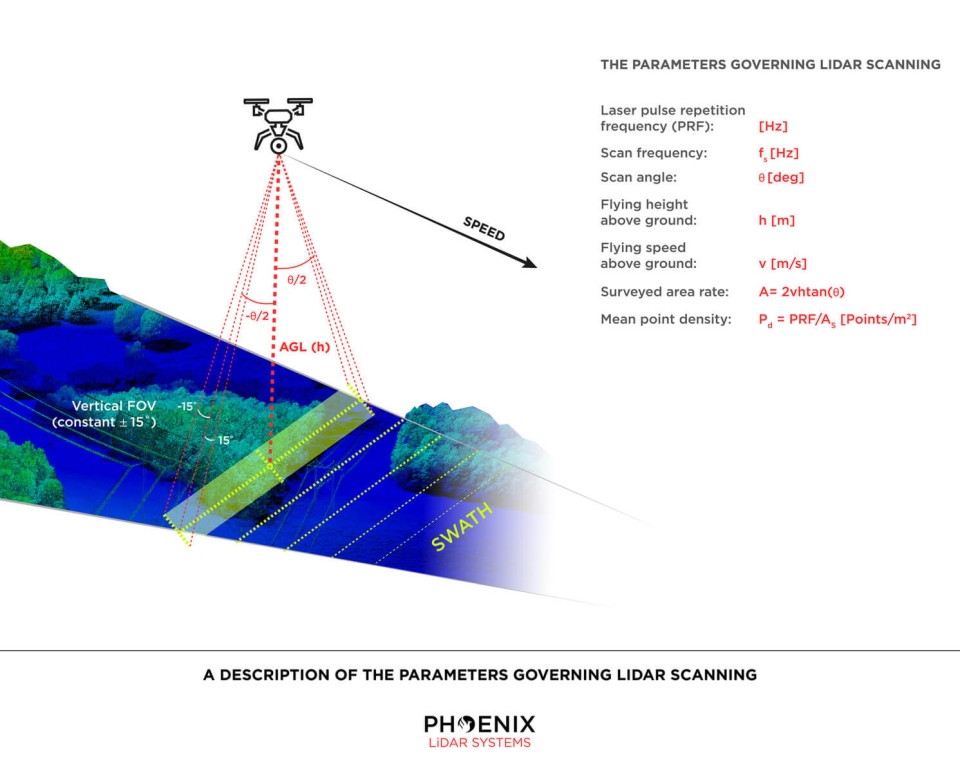
"Phoenix LiDAR Systems" kuria sistemas, skirtas mobiliajam kartografavimui. Atliekant tyrimus iš judančio objekto, operatorius turi atsižvelgti į tam tikrus parametrus: greitis, skenavimo plotas, aukštis, dažnis, impulsų dažnis, skenavimo kampas ir taškų tankis - visi šie parametrai yra labai svarbūs fiksuojant duomenis. Atkreipkite dėmesį, kad priklausomai nuo šių parametrų gausite skirtingo nuotolio ir tankio skenavimo juostą. faktinis tikslumas priklauso nuo GPS apdorojimo parinkčių (RTK, PPK, WAAS), jonosferos sąlygų, palydovo matomumo, skrydžio aukščio (AGL) ir kitų veiksnių.
RTK (realaus laiko kinematikos) režimu maždaug kartą per sekundę iš atskaitos stoties į roverį siunčiama apie 500 baitų diferencialinių pataisų. Taikydamas šias pataisas, roveris gali nustatyti savo padėtį centimetro tikslumu.
RTK režimo ir Post Processed skirtumai yra šie:
- Post Processed reikia papildomos programinės įrangos;
- Post Processed nereikalingas etaloninės stoties ir roverio ryšys realiuoju laiku;
- Post Processed dažnai gaunami tikslesni rezultatai, ypač aplinkoje, kurioje palydovų matomumas yra blogas (žemės skenavimas);
- Post Processed leidžia naudotojui geriau įvertinti sprendimo tikslumą.
Mob.: 8 699 47 092
geo@geonovus.lt